 Get in touch
Get in touch

1. Pendahuluan: Mendekonstruksi Tenaga Kuda Motor Induksi AC Motor Induksi AC merupakan salah satu ...
BACA LEBIH LANJUTBerita Industri
2026-04-21
Motor DC (arus searah) mengubah energi listrik menjadi putaran mekanis menggunakan interaksi antara medan magnet dan konduktor pembawa arus. Prinsip pengoperasiannya mengikuti hukum gaya Lorentz: ketika arus listrik mengalir melalui konduktor yang ditempatkan di dalam medan magnet, konduktor tersebut mengalami gaya yang tegak lurus terhadap arah arus dan arah medan. Susun konduktor pembawa arus dalam jumlah yang cukup dalam rakitan yang berputar dan gaya tersebut menjadi torsi rotasi kontinu.
Secara praktis, motor DC mengandung dua sistem magnet dasar. Itu stator menyediakan medan magnet stasioner — baik dari magnet permanen atau elektromagnet (belitan medan). Itu rotor (juga disebut angker) membawa konduktor yang terhubung ke catu daya DC eksternal. Arus yang mengalir melalui konduktor rotor bereaksi dengan medan stator untuk menghasilkan torsi, memutar rotor. Selama tegangan DC diterapkan, motor terus berputar.
Kecepatan motor DC terutama dikendalikan oleh tegangan yang diberikan: tegangan yang lebih tinggi menghasilkan putaran yang lebih cepat. Output torsi sebanding dengan arus jangkar. Hubungan langsung antara tegangan, arus, kecepatan, dan torsi membuat motor DC sangat mudah dikendalikan dalam rentang pengoperasian yang luas — suatu sifat yang menjelaskan dominasinya yang berkelanjutan dalam aplikasi penggerak kecepatan variabel.
Arsitektur internal motor DC bervariasi antara desain brushed dan brushless, namun beberapa komponen inti umum pada kedua tipe tersebut.
Stator adalah rakitan luar motor yang stasioner. Pada motor DC kecil dan tenaga kuda fraksional, medan stator dihasilkan oleh magnet permanen yang dipasang pada lubang bagian dalam rumah motor. Pada motor DC industri yang lebih besar, stator membawa belitan medan — gulungan kawat yang dililitkan di sekitar potongan kutub — yang melaluinya arus eksitasi DC terpisah mengalir untuk menciptakan medan magnet. Rangka stator biasanya terbuat dari baja silikon yang dilaminasi untuk meminimalkan kerugian arus eddy.
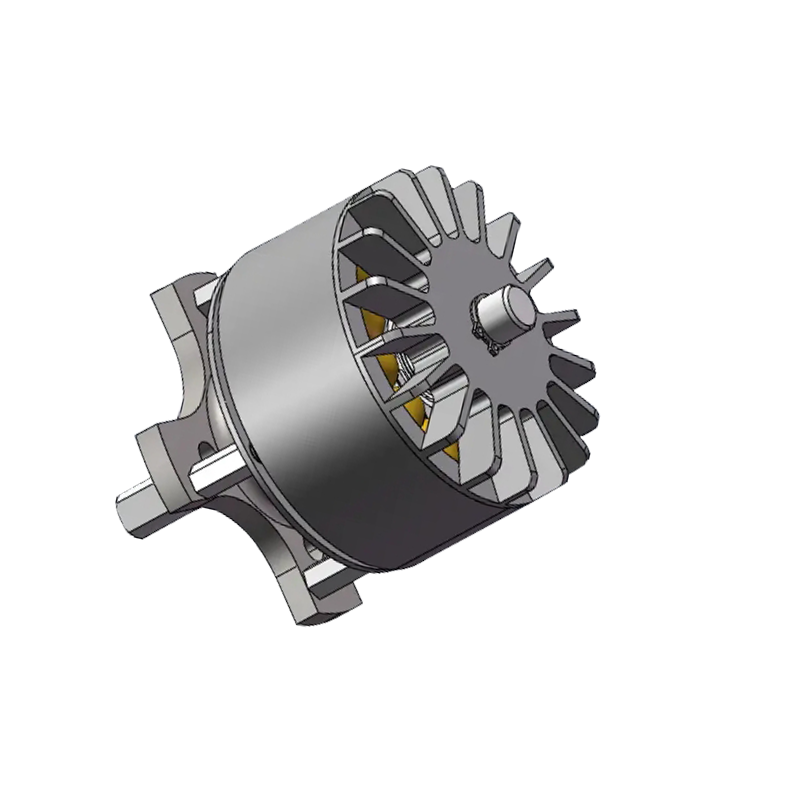
Rotor adalah rakitan berputar yang dipasang pada poros motor. Ini terdiri dari inti besi yang dilaminasi dengan slot yang dibuat di sekeliling kelilingnya, di mana belitan jangkar dililitkan. Konstruksi yang dilaminasi mengurangi kerugian arus eddy pada besi. Pada motor DC yang disikat, rotor membawa kumparan lilitan; pada motor DC brushless, rotor membawa magnet permanen.
Komutator adalah cincin tembaga tersegmentasi yang dipasang pada poros rotor. Setiap segmen terhubung ke kumparan jangkar yang berbeda. Sikat karbon — kontak pegas yang dipasang di rumah stator — menekan permukaan komutator dan mempertahankan kontak listrik saat poros berputar. Saat rotor berputar, segmen komutator lewat di bawah sikat secara berurutan, secara otomatis mengubah arah arus di setiap kumparan pada saat yang tepat untuk menjaga torsi bekerja dalam arah rotasi yang konsisten. Peralihan mekanis inilah yang mendefinisikan motor DC yang disikat.
Gulungan jangkar adalah konduktor tembaga berinsulasi yang dililitkan ke dalam slot rotor. Konfigurasi belitan — putaran, gelombang, atau simpleks — menentukan jumlah jalur arus paralel yang melalui jangkar dan mempengaruhi karakteristik torsi kecepatan motor. Gulungan medan pada stator, jika ada, digulung untuk menghasilkan jumlah kutub magnet yang tepat untuk kecepatan desain dan kisaran torsi.
Poros keluaran mentransmisikan torsi mekanis ke beban. Bantalan bola atau bantalan selongsong yang presisi menopang poros di setiap ujung rumahan, menjaga celah udara antara rotor dan stator dalam toleransi yang ketat. Perumahan (lonceng ujung dan rangka) memberikan dukungan struktural, melindungi komponen internal, dan dalam beberapa desain dilengkapi sirip pendingin atau perlengkapan pemasangan untuk kipas eksternal.
Pada motor arus searah yang disikat, komutator dan sikat melakukan fungsi peralihan arus secara mekanis. Saat jangkar berputar, segmen komutator bergerak melewati kontak sikat stasioner, menghubungkan setiap kumparan jangkar ke suplai secara berurutan. Hal ini memastikan bahwa terlepas dari posisi rotor, kumparan yang saat ini sejajar dengan celah kutub stator selalu mengalirkan arus ke arah yang benar untuk menghasilkan torsi maju.
Hasilnya adalah motor yang berjalan langsung dari suplai DC tanpa memerlukan pergantian elektronik eksternal. Hubungkan motor DC yang disikat ke baterai atau suplai DC yang diatur dan motor tersebut akan segera berputar. Membalikkan polaritasnya maka akan membalikkan arah. Kesederhanaan ini adalah alasan utama motor sikat tetap banyak digunakan dalam aplikasi dengan kompleksitas rendah hingga menengah yang sensitif terhadap biaya.
Kontak mekanis antara sikat dan komutator menimbulkan keterbatasan utama motor. Gesekan sikat-komutator menghasilkan panas dan serpihan keausan, dan busur api yang terjadi saat sakelar segmen menghasilkan interferensi elektromagnetik (EMI). Penggantian sikat biasanya diperlukan setiap 1.000–5.000 jam pengoperasian tergantung pada beban saat ini, kecepatan, dan lingkungan pengoperasian. Permukaan komutator juga memerlukan inspeksi dan pelapisan ulang secara berkala.
Motor DC yang disikat tidak cocok untuk digunakan di lingkungan yang mudah terbakar atau meledak karena busur sikat dapat menyulut gas di sekitarnya. Kecepatan maksimumnya juga dibatasi oleh kendala mekanis dari kontak sikat-komutator, yang biasanya mencapai puncaknya 3.000–8.000 RPM di sebagian besar desain.

Motor DC tanpa sikat (BLDC) menghilangkan seluruh rangkaian komutator dan sikat dengan memindahkan magnet permanen ke rotor dan belitan ke stator. Peralihan arus — pergantian — ditangani secara elektronik oleh pengontrol motor yang memantau posisi rotor melalui sensor efek Hall atau deteksi EMF belakang dan memberi energi pada kumparan stator dalam urutan yang benar untuk mempertahankan rotasi.
Inversi arsitektur ini memiliki konsekuensi signifikan terhadap kinerja, pemeliharaan, dan jangkauan aplikasi.
| Karakteristik | Motor DC yang disikat | Motor DC tanpa sikat |
|---|---|---|
| Metode pergantian | Mekanik (sikat komutator) | Elektronik (sensor pengontrol) |
| Efisiensi | 75–85% | 85–95% |
| Pemeliharaan | Diperlukan penggantian sikat secara teratur | Minimal — hanya bantalan |
| Rentang kecepatan | Biasanya hingga ~8.000 RPM | Hingga 100.000 RPM dimungkinkan |
| EMI / busur | Busur kuas yang signifikan | Rendah (tidak ada kontak sikat) |
| Kesesuaian lingkungan berbahaya | Tidak cocok (sikat lengkung) | Cocok (tidak ada busur) |
| Persyaratan pengontrol | Kontrol tegangan DC sederhana | Diperlukan pengontrol elektronik khusus |
| Biaya satuan | Lebih rendah | Lebih tinggi (pengendali motor) |
| Umur | Dibatasi oleh keausan sikat | Lebih lama — tidak memakai komponen kontak |
Keuntungan efisiensi motor tanpa sikat sangat signifikan dalam aplikasi bertenaga baterai. Drivetrain kendaraan listrik atau perkakas listrik yang menjalankan motor BLDC dengan efisiensi 92% versus setara dengan 80% menghasilkan waktu pengoperasian yang lebih lama per pengisian daya dan pengurangan beban termal pada paket baterai. Hal ini merupakan pendorong utama di balik peralihan yang hampir universal ke motor tanpa sikat (brushless) pada peralatan listrik tanpa kabel, kendaraan listrik, drone, dan sistem HVAC selama dua dekade terakhir.
Terlepas dari keunggulan kinerja desain brushless, motor DC brushed tetap menjadi pilihan tepat dalam beberapa kategori aplikasi.
Penggerak motor DC (juga disebut penggerak DC atau pengontrol DC) adalah paket elektronika daya yang mengatur tegangan dan arus yang disuplai ke motor DC untuk mengontrol kecepatan, torsi, akselerasi, dan arahnya. Motor dan penggerak bersama-sama membentuk sistem kontrol gerak yang lengkap — motor menghasilkan keluaran mekanis, dan penggerak mengelola masukan listrik untuk mencapai profil gerak yang diinginkan.
Drive DC brushed tradisional menggunakan kontrol fase thyristor (SCR) atau teknik PWM (modulasi lebar pulsa) untuk mengatur tegangan jangkar. Penggerak empat kuadran dapat mengontrol kecepatan dan torsi di kedua arah putaran, memungkinkan pengereman regeneratif — di mana motor bertindak sebagai generator selama perlambatan, mengembalikan energi ke bus suplai. Kemampuan ini banyak digunakan dalam aplikasi industri seperti mesin penggulungan, rolling mill, dan hoist yang memerlukan perlambatan terkendali dan pemulihan energi.
Keakuratan pengaturan kecepatan dari penggerak DC loop tertutup dengan sinyal umpan balik takometer biasanya ±0,1% dari kecepatan yang disetel , yang menjelaskan dominasi panjang mereka dalam kontrol gerak industri presisi sebelum penggerak frekuensi variabel AC matang pada tahun 1990an.
Pengontrol motor BLDC melakukan pergantian elektronik dengan membaca posisi rotor — melalui sensor efek Hall yang tertanam di motor atau melalui estimasi EMF balik tanpa sensor — dan mengalihkan arus melalui fase stator dalam urutan yang benar. Pengontrol juga mengatur siklus kerja PWM untuk mengatur kecepatan dan memonitor arus untuk membatasi torsi. Penggerak BLDC yang lebih canggih menerapkan kontrol berorientasi medan (FOC), yang mengoptimalkan sudut antara medan stator dan magnet rotor untuk torsi maksimum per ampere pada rentang kecepatan penuh.
Dalam sistem gerak terintegrasi — seperti sambungan robot, sumbu servo, dan spindel CNC — motor BLDC dan penggeraknya biasanya dipasangkan dan disetel bersama sebagai satu set yang serasi. Parameter penggerak termasuk bandwidth loop saat ini, penguatan loop kecepatan, dan waktu pergantian dikonfigurasi selama commissioning dan disimpan dalam memori nonvolatil drive.
Lanskap aplikasi untuk motor DC brushed dan brushless mencerminkan kekuatannya masing-masing dalam hal biaya, pemeliharaan, rentang kecepatan, dan presisi kontrol.
1. Pendahuluan: Mendekonstruksi Tenaga Kuda Motor Induksi AC Motor Induksi AC merupakan salah satu ...
BACA LEBIH LANJUT1. Pendahuluan Dalam otomasi industri modern, konstruksi pusat data, peningkatan elektronik konsumen...
BACA LEBIH LANJUTMotor stepper mewakili landasan kontrol gerak modern, menawarkan pemosisian dan ketelitian ...
BACA LEBIH LANJUTLanskap motor industri sedang mengalami transformasi signifikan, didorong oleh ...
BACA LEBIH LANJUTProduk Terkait
Gedung 10, No.199, Jalan Jinfeng, Teknologi Tinggi Suzhou, Provinsi Jiangsu, Cina
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 Ada apa
Ada apa
Hak Cipta © Suzhou Retek Electric Technology Co., Ltd. Semua Hak Dilindungi Undang-undang. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers





 – Motor UAV Daya Tinggi Dorong 5kg")







